|
Bender Type Actuators (Bimorph and Multimorph Design)
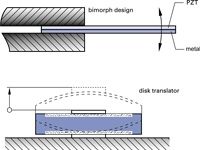
A simple bender actuator (bimorph design) consists of a passive metal substrate glued to a piezoceramic strip (see Fig.45a). A piezo bimorph reacts to voltage changes the way the bimetallic strip in a thermostat reacts to temperature changes. When the ceramic is energized it contracts or expands proportional to the applied voltage. Since the metal substrate does not change its length, a deflection proportional to the applied voltage occurs. The bimorph design amplifies the dimension change of the piezo, providing motion up to several millimeters in an extremely small package. In addition to the classical strip form, bimorph disk actuators where the center arches when a voltage is applied, are also available.
PZT/PZT combinations, where individual PZT layers are operated in opposite modes (contraction/expansion), are also available.
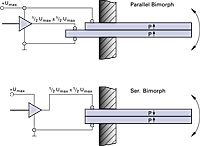
Two basic versions exist: the two-electrode bimorph (serial bimorph) and the three-electrode bimorph (parallel bimorph), as shown in Fig. 45b. In the serial type, one of the two ceramic plates is always operated opposite to the direction of polarization. To avoid depolarization, the maximum electric field is limited to a few hundred volts per millimeter. Serial bimorph benders are widely used as force and acceleration sensors.
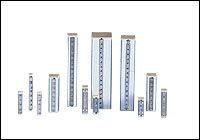
In addition to the two-layer benders, monolithic multilayer piezo benders are also available. As with multilayer stack actuators, they run on a lower operating voltage (60 to 100 V).
Bender type actuators provide large motion in a small package at the cost of low stiffness, force and resonant frequency.
Examples:
P-286 - 289 disk translators,
PL122 multilayer bender actuators
Shear Actuators
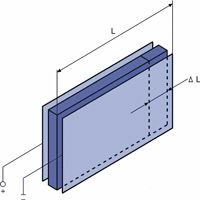
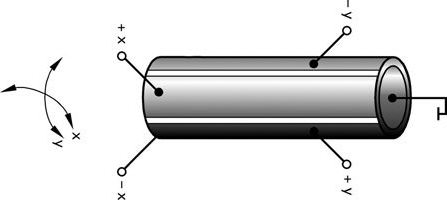
Shear actuators can generate high forces and large displacements. A further advantage is their suitability for bipolar operation, whereby the mid-position corresponds to a drive voltage of 0 V. In shear mode, unlike in the other modes, the electric field is applied perpendicular to the polarization direction. (see Fig. 46). The corresponding strain coefficient, d15, has large-signal values as high as 1100 pm/V, providing double the displacement of linear actuators of comparable size based on d33.
Shear actuators are suitable for applications like piezo linear motors, and are available as both single-axis and two-axis positioning elements.
Examples:
PX155 Shear Actuator, PicoCube, Piezo-Walk Linear Motors® motor
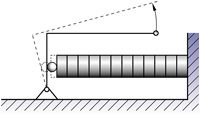
Piezo Actuators with Integrated Lever Motion Amplifiers
Piezo actuators or positioning stages can be designed in such a way that a lever motion amplifier is integrated into the system. To maintain sub-nanometer resolution with the increased travel range, the lever system must be extremely stiff, backlash- and friction-free, which means ball or roller bearings cannot be used. Flexures are ideally suited as linkage elements. Using flexures, it is also possible to design multi-axis positioning systems with excellent guidance characteristics.
PI employs finite element analysis (FEA) computer simulation to optimize flexure nanopositioners for the best possible straightness and flatness (see Fig. 49 and Fig. 51).
Piezo positioners with integrated motion amplifiers have both advantages and disadvantages compared to standard piezo actuators:
Advantages:
Longer travel Compact size compared to stack actuators with equal displacement Reduced capacitance (= reduced drive current)
Disadvantages:
Reduced stiffness Lower resonant frequency
The following relations apply to (ideal) levers used to amplify motion of any primary drive system:

where:
r = lever transmission ratio
DL0 = travel of the primary drive [m]
DLSys = travel of the lever-amplified system [m]
ksys = stiffness of the lever-amplified system [N/m]
k0 = stiffness of the primary drive system (piezo stack and joints) [N/m]
fres-sys = resonant frequency of the amplified system [Hz]
fres-0 = resonant frequency of the primary drive system (piezo stack and joints) [Hz]
Note:
The above equations are based on an ideal lever design with infinite stiffness and zero mass. They also imply that no stiffness is lost at the coupling interface between the piezo stack and the lever. In real applications, the design of a good lever requires long experience in micromechanics and nanomechanisms. A balance between mass, stiffness and cost must be found, while maintaining zero-friction and zero-backlash conditions.
Coupling the piezo stack to the lever system is crucial. The coupling must be very stiff in the pushing direction but should be soft in all other degrees of freedom to avoid damage to the ceramics. Even if the stiffness of each of the two interfaces is as high as that of the piezo stack alone, a 67 % loss of overall stiffness still results. In many piezo-driven systems, the piezo stiffness is thus not the limiting factor in determining the stiffness of the mechanism as a whole.
PI piezomechanics are optimized in this regard as a result of more than 30 years experience with micromechanics, nanopositioning and flexures.
Piezo Flexure Nanopositioners
For applications where extremely straight motion in one or more axes is needed and only nanometer or microrad deviation from the ideal trajectory can be tolerated, flexures provide an excellent solution.
A flexure is a frictionless, stictionless device based on the elastic deformation (flexing) of a solid material (e.g. steel). Sliding and rolling are entirely eliminated. In addition, flexure devices can be designed with high stiffness, high load capacity and do not wear. They are also less sensitive to shock and vibration than other guiding systems. They are also maintenance-free, can be fabricated from non-magnetic materials, require no lubricants or consumables and hence, unlike air cushion bearings, are suitable for vacuum operation.
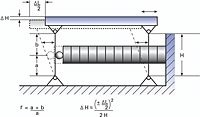
Parallelogram flexures exhibit excellent guidance characteristics. Depending on complexity and tolerances, they have straightness/flatness values in the nanometer range or better. Basic parallelogram flexures cause arcuate motion (travel in an arc) which introduces an out-of-plane error of about 0.1% of the travel range (see Fig. 48). The error can be estimated by the following equation:
(Equation 28)

where:
DH = out-of-plane error [m]
DL = distance traveled [m]
H = length of flexures [m]
For applications where this error is intolerable, PI has designed a zero-arcuate-error multi-flexure guiding system. This special design, employed in most PI flexure stages, makes possible straightness/ flatness in the nanometer or microradian range (see Fig. 49).
Note:
Flexure positioners are far superior to traditional positioners (ball bearings, crossed roller bearings, etc.) in terms of resolution, straightness and flatness. Inherent friction and stiction in these traditional designs limit applications to those with repeatability requirements on the order of 0.5 to 0.1 µm. Piezo flexure nanopositioning systems have resolutions and repeatabilities which are superior by several orders of magnitude.
|