|
Piezo Actuator | Piezo Motors | Piezo Transducer | Piezo Stages | Controllers | FSM |
Features of Piezoelectric Positioning Systems |
|||
|
Note / Additional Information: Piezo Application Examples are found in the Piezo Blog 
Video Animations of Different Piezo Motion Technologies Advantages of Piezoelectric MechanismsUnlimited Resolution Piezoelectric mechanisms convert electrical energy directly to mechanical energy. They make motion in the sub-nanometer range possible. There are no moving parts in contact with each other to limit resolution. Fast Expansion Piezo mechanisms react in a matter of microseconds. Acceleration rates of more than 10,000 g can be obtained. High Force Generation High-load piezo actuators capable of moving loads of several tons are available today. They can cover travel ranges of several 100 µm with resolutions in the sub-nanometer range (see examples like the P-056, in the "Piezo Actuators" section). No Magnetic Fields The piezoelectric effect is related to electric fields. Piezo actuators do not produce magnetic fields nor are they affected by them. Piezo devices are especially well suited for applications where magnetic fields cannot be tolerated. Low Power Consumption Static operation, even holding heavy loads for long periods, consumes virtually no power. Piezo actuators behave very much like an electrical capacitor. When at rest, no heat is generated. No Wear and Tear A piezo actuator has no moving parts like gears or bearings. Its displacement is based on solid state dynamics and shows no wear and tear. PI has conducted endurance tests on piezo actuators in which no measurable change in performance was observed after several billion cycles. Vacuum and Clean Room Compatible Piezoelectric actuators neither cause wear nor require lubricants. The new PICMA® actuators with ceramic insulation have no polymer coating and are thus ideal for UHV (ultra-high vacuum) applications. Operation at Cryogenic Temperatures The piezoelectric effect continues to operate even at temperatures close to 0 kelvin. PI offers specially prepared actuators for use at cryogenic temperatures. |
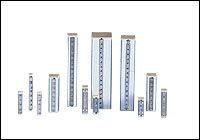
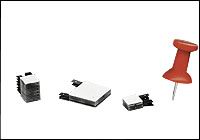
 Piezoelectric nanopositioning systems large (e.g. for precision machining) medium (e.g. for interferometry) small (e.g. for data storage medium testing) |
||
| Applications for Piezo Positioning Technology | |||
|
|
 Selection of piezo nanopositioning stages. |
|
Glossary |
|
| |||
|
Actuator: A device that can produce force or motion (displacement). Blocked Force: The maximum force an actuator can generate if blocked by an infinitely rigid restraint. Ceramic: A polycrystalline, inorganic material. Closed-Loop Operation: The displacement of the actuator is corrected by a servo-controller compensating for nonlinearity, hysteresis and creep. See also "Open-Loop Operation". Compliance: Displacement produced per unit force. The reciprocal of stiffness. Creep: An unwanted change in the displacement over time. Curie Temperature: The temperature at which the crystalline structure changes from a piezoelectric (non-symmetrical) to a non-piezoelectric (symmetrical) form. At this temperature PZT ceramics looses the piezoelectric properties. Drift: See "creep" Domain: A region of electric dipoles with similar orientation. HVPZT: Acronym for High-Voltage PZT (actuator). Hysteresis: Hysteresis in piezo actuators is based on crystalline polarization and molecular effects and occurs when reversing driving direction. Hysteresis is not to be confused with backlash. LVPZT: Acronym for low-voltage PZT (actuator). Monolithic Multilayer Actuator: An actuator manufactured in a fashion similar to multilayer ceramic capacitors. Ceramic and electrode material are cofired in one step. Layer thickness is typically on the order of 20 to 100 µm. Open-Loop Operation: The actuator is used without a position sensor. Displacement roughly corresponds to the drive voltage. Creep, nonlinearity and hysteresis remain uncompensated. Parallel Kinematics: Unlike in serial kinematics designs, all actuators act upon the same moving platform. Advantages: Minimized inertia, no moving cables, lower center of gravity, no cumulative guiding errors and more-compact construction. Parallel Metrology: Unlike in serial metrology designs, each sensor measures the position of the same moving platform in the respective degree of freedom. This keeps the off-axis runout of all actuators inside the servo-control loop and allows it to be corrected automatically (active guidance). Piezoelectric Materials: Materials that change their dimensions when a voltage is applied and produce a charge when pressure is applied. Poling / Polarization: The procedure by which the bulk material is made to take on piezoelectric properties, i.e. the electrical alignment of the unit cells in a piezoelectric material. Piezo Mechanism: A device that has a piezoelectric ceramic at its core. It can comprise additional mechanical elements such as motion amplifiers or flexure guiding systemms. Piezo mechanisms are used to produce force or motion with very high resolution and short response times. PZT: Acronym for plumbum (lead) zirconate titanate. Polycrystalline ceramic material with piezoelectric properties. Often also used to refer to a piezo actuator or translator. Serial Kinematics: Unlike in parallel kinematics designs, each actuator acts upon a separate platform of its own. There is a clear relationship between actuators and axes. Advantages: Simpler to assemble; simpler control algorithm. Disadvantages: Poorer dynamic characteristics, integrated "Parallel Metrology" is not possible, cumulative guiding errors, lower accuracy. Serial Metrology: One sensor is assigned to each degree of freedom to be servo-controlled. Undesired off-axis motion (guiding error) from other axes in the direction of a given sensor, go unrecognized and uncorrected (see also "Parallel Metrology"). Stiffness: Spring constant (for piezoelectric materials, not linear). Trajectory-Control: Provisions to prevent deviation from the specified trajectory. Can be passive (e.g. flexure guidance) or active (e.g. using additional active axes). Translator: A linear actuator. |
 Equipment for fully automated screen printing of electrodes on piezoelectric and dielectric ceramics. 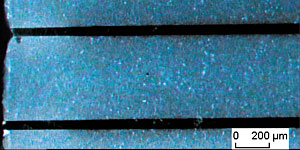 Piezoceramic layers in a "classical" stack actuator (HVPZT).  Piezoceramic layers in a monolithic actuator (LVPZT). 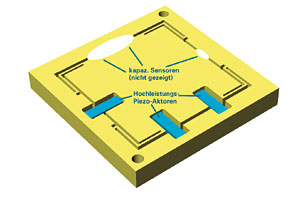 Nanopositioning system featuring parallel kinematics and parallel metrology. 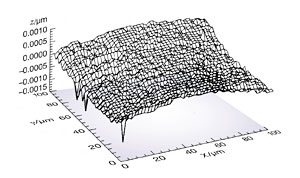 Flatness of a nanopositioning stage with active trajectory control is better than 1 nanometer over a 100 x 100 µm scanning range.  Design principle of a stacked XY piezo stage (serial kinematics). |
||
Piezo Tutorial: Symbols and Units |
| A | Surface area [m²] (meter²) | ||
| α | Coefficient of Thermal Expansion (CTE) [K-¹] (1/kelvin) | ||
| C | Capacitance (F) [A • s / V] | ||
| dij | Piezo modulus (tensor components) [m/V] (meter/volt) | ||
| ds | Distance, thickness [m] (meter) | ||
| Є | Dielectric constant [A • s/V • m] (ampere · second / volt · meter) | ||
| E | Electric field strength [V/m] (volt/meter) | ||
| f | Operating frequency [Hz] (hertz = 1/second) | ||
| F | Force [N] (newton) | ||
| f0 | Unloaded resonant frequency [Hz] (hertz = 1/second) | ||
| g | Acceleration due to gravity: 9.81 m/s² (meter/second2) | ||
| i | Current [A] (ampere) | ||
| kS | Stiffness of restraint (load) [N/m] (newton/meter) | ||
| kT | Stiffness of piezo actuators [N/m] (newton/meter) | ||
| L0 | Length of non-energized actuator [m] (meter) | ||
| ∆L | Change in length (displacement) [m] | ||
| ∆L0 | Nominal displacement with zero applied force, [m] (meter) | ||
| ∆Lt=0.1 | Displacement at time t = 0.1 sec after voltage change, [m] (meter) | ||
| m | Mass [kg] (kilogram) | ||
| P | Power [W] (watt) | ||
| Q | Charge [C] (coulomb = ampere x second) | ||
| S | Strain [iL/L] (dimensionless) | ||
| t | Time [s] (second) | ||
| Tc | Curie temperature [°C] | U | Voltage [V] (volt) |
| Up-p | Peak-to-peak voltage [V] (volt) | ||
Introduction |
Nanopositioning with Piezoelectric Technology |
||||
|
Basics The piezoelectric effects is often encountered in daily life, for example in lighters, loudspeakers and buzzers. In a gas lighter, pressure on a piezoceramic generates an electric potential high enough to create a spark. Most electronic alarm clocks do not use electronicmagnetic buzzers anymore, because piezoelectric ceramics are more compact and more efficient. In addition to such simple applications, piezo technology has recently established itself in the automotive branch. Piezo-driven injection valves in diesel engines require much lower transition times than conventional electromagnetic valves, providing quieter operation and lower emissions. The term "piezo" is derived from the Greek word for pressure. In 1880 Jacques and Pierre Curie discovered that an electric potential could be generated by applying pressure to quartz crystals; they named this phenomenon the "piezo effect". Later they ascertained that when exposed to an electric potential, piezoelectric materials change shape. This they named the "inverse piezo effect". The first commercial applications of the inverse piezo effect were for sonar systems that were used in World War I. A break through was made in the 1940's when scientists discovered that barium titanate could be bestowed with piezoelectric properties by exposing it to an electric field. Piezoelectric materials are used to convert electrical energy to mechanical energy and vice-versa. The precise motion that results when an electric potential is applied to a piezoelectric material is of primordial importance for nanopositioning. Actuators using the piezo effect have been commercially available for 35 years and in that time have transformed the world of precision positioning and motion control. |
|
|||
Quick Facts |
|||
|
| |||||||||||||||||||||||||||
  | ||||||||||||||||||||||||||||